トップ
ポートフォリオ
注目論文
メディア掲載
|
自己紹介
業績一覧
プロジェクト
ブログ
ライト
ダーク
自動
日本語
日本語
English
Publication
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
柔軟な静電油圧人工筋肉は脚式ロボットの機敏で適用的、且つエネルギー効率の優れたロコモーションを実現する。
Thomas JK Buchner
,
福島 俊彦
,
Amirhossein Kazemipour
,
Stephan-Daniel Gravert
,
Manon Prairie
,
Pascal Romanescu
,
Philip Arm
,
Yu Zhang
,
Xingrui Wang
,
Steven L Zhang
,
Johannes Walter
,
Christoph Keplinger
,
Robert K Katzschmann
PDF
引用
プロジェクト
動画
DOI
プレスリリース
Active pole bending effect in pole support phase
ポール高跳び高さ向上のために大域的かつ相互作用を考慮したポール支持期の動作パラメーター空間を探索する。
福島 俊彦
,
Satoshi Nishikawa
,
Yasuo Kuniyoshi
PDF
引用
プロジェクト
動画
DOI
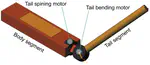
Inertial tail effects during righting of squirrels in unexpected falls: from behavior to robotics
リスの体重のたった3%重量の尻尾の慣性力は、予想外な落下から空中で立ち直りを可能にし、安全な着地を実現する。
福島 俊彦
,
Robert Siddall
,
Fabian Schwab
,
Séverine LD Toussaint
,
Greg Byrnes
,
John A. Nyakatura
,
Ardian Jusufi
PDF
引用
プロジェクト
動画
DOI
Compliance, mass distribution and contact forces in cursorial and scansorial locomotion with biorobotic physical models
自然界のトップスプリンターであるトカゲの形態学的知性は、ロボットの非構造的環境下におけるロコモーションを可能にする。
Robert Siddall
,
福島 俊彦
,
Drilon Bardhi
,
Buna Perteshoni
,
Albulena Morina
,
Era Hasimja
,
Yll Dujaka
,
Gezim Haziri
,
Lina Martin
,
Hritwick Banerjee
,
Ardian Jusufi
PDF
引用
プロジェクト
動画
DOI
Modeling and control of a soft robotic fish with integrated soft sensing
eGaInセンサーとデータドリブンなモデルで完全に柔軟な魚ロボットの実時間制御を実現する。
Yu-Hsiang Lin
,
Robert Siddall
,
Fabian Schwab
,
福島 俊彦
,
Hritwick Banerjee
,
Youngjoon Baek
,
Daniel Vogt
,
Yong-Lae Park
,
Ardian Jusufi
PDF
引用
プロジェクト
動画
DOI
Self-righting in squirrels during unexpected falls--towards the crucial function of bushy tails in arboreal mammals
尻尾の慣性動作はリスの空中での姿勢制御を可能にする。
福島 俊彦
,
Robert Siddall
,
Greg Byrnes
,
John a Nyakatura
,
Séverine Toussaint
,
Ardian Jusufi
引用
プロジェクト
ポスター
DOI
Pole vaulting robot with dual articulated arms that can change reaching position using active bending motion
双椀ヒューマノイドロボットにより、1.67mの棒高跳びに成功する。
Satoshi Nishikawa
,
Tomohiro Kobayashi
,
福島 俊彦
,
Yasuo Kuniyoshi
PDF
引用
プロジェクト
DOI
Active bending motion of pole vault robot to improve reachable height
ポール支持期における能動ポール曲げ動作は棒高跳びロボットの跳躍高さを向上させる。
福島 俊彦
,
Satoshi Nishikawa
,
Yasuo Kuniyoshi
PDF
引用
プロジェクト
動画
DOI
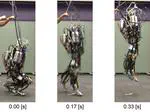
A musculoskeletal bipedal robot designed with angle-dependent moment arm for dynamic motion from multiple states
角度依存モーメントアーム機構は筋骨格ロボットの跳躍可能姿勢の幅を広げる
Satoshi Nishikawa
,
Kazutoshi Tanaka
,
Kazuya Shida
,
福島 俊彦
,
Ryuma Niiyama
,
Yasuo Kuniyoshi
PDF
引用
DOI
受動歩行機の足裏形状最適化による歩行安定化
最適化された受動歩行機の足裏形状は斜面傾斜角に対する堅牢性を向上させる。
福島 俊彦
,
兵頭 和幸
,
川西 通裕
,
成清 辰生
PDF
引用
プロジェクト
DOI
»
引用
×