トップ
ポートフォリオ
注目論文
メディア掲載
|
自己紹介
業績一覧
プロジェクト
ブログ
ライト
ダーク
自動
日本語
日本語
English
Publication
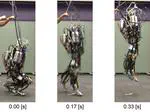
A musculoskeletal bipedal robot designed with angle-dependent moment arm for dynamic motion from multiple states
角度依存モーメントアーム機構は筋骨格ロボットの跳躍可能姿勢の幅を広げる
Satoshi Nishikawa
,
Kazutoshi Tanaka
,
Kazuya Shida
,
福島 俊彦
,
Ryuma Niiyama
,
Yasuo Kuniyoshi
PDF
引用
DOI
受動歩行機の足裏形状最適化による歩行安定化
最適化された受動歩行機の足裏形状は斜面傾斜角に対する堅牢性を向上させる。
福島 俊彦
,
兵頭 和幸
,
川西 通裕
,
成清 辰生
PDF
引用
プロジェクト
DOI
Effective timing of swing-up motion by a pole-vaulting robot
棒高跳びにおけるスイング動作は慣性的にポールに曲げモーメントを印可する。
Satoshi Nishikawa
,
福島 俊彦
,
Yasuo Kuniyoshi
PDF
引用
プロジェクト
DOI
Transitional buckling model for active bending effect in pole vault
棒高跳びにおける能動的ポール曲げ動作は跳躍高さを向上させる。
福島 俊彦
,
Satoshi Nishikawa
,
Kazutoshi Tanaka
,
Yasuo Kuniyoshi
PDF
引用
プロジェクト
ポスター
業績一覧
福島俊彦の学術業績一覧
«
引用
×