🇯🇵 日本語
🦘 PELE: HASEL駆動の筋骨格脚ロボット
静電油圧人工筋肉で動く脚ロボットが機敏で適応力があり、エネルギー効率の良いロコモーションを実現
🐟 魚ロボット
遊泳運動における筋活動の生物学的理解のためのロボットアニマル
🐿️ リスロボット
リスの空中姿勢制御能力を研究するためのリスロボット
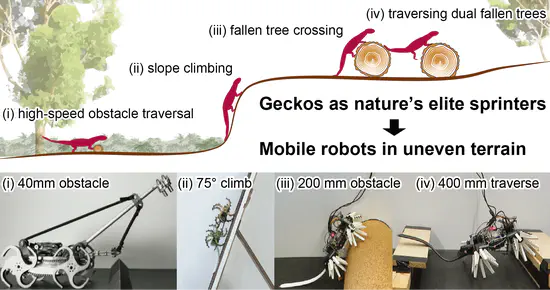
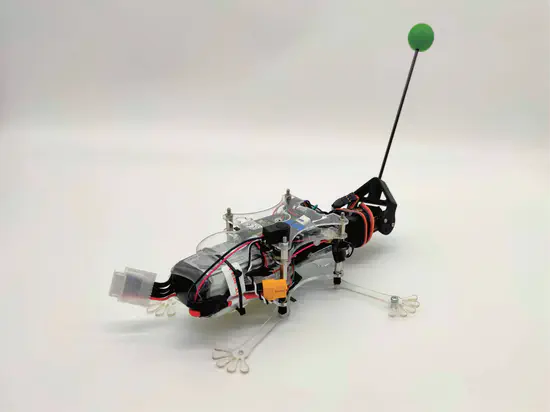
🦎 トカゲロボット
自然界のトップスプリンターであるトカゲから着想を得たロボット
🏃 棒高跳びロボット
ロボット工学の観点からのスポーツバイオメカニクス
🚶 受動歩行機
足裏形状を最適化し、斜面傾斜角変化にロバストな受動歩行を実現する
🤖 ロボット関連
🦘 PELE: A musculoskeletal robotic leg powered by HASELs
A robotic leg powered by electrohydraulic artificial muscles achieves agile, adaptive, yet energy-efficient locomotion.
🐟 Fish robot
A fish robot as a robotic animal for understanding the biology of muscle activity for swimming locomotion
🐿️ Squirrel robot
A squirrel robot for studying squirrel’s aerial righting ability.
🦎 Gecko robots
Geckos robots inspired from a nature’s elite sprinter.
🏃 Pole vaulting robots
Sports Biomechanics from the Perspective of Robotics
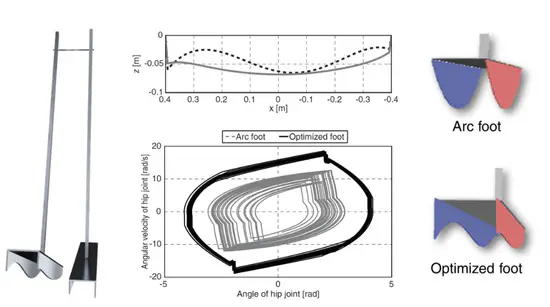
🚶 Passive Dynamic Walker
Optimizing foot shape of a passive dynamic walker enables robust walking against changes in slope inclination.