🦎 トカゲロボット
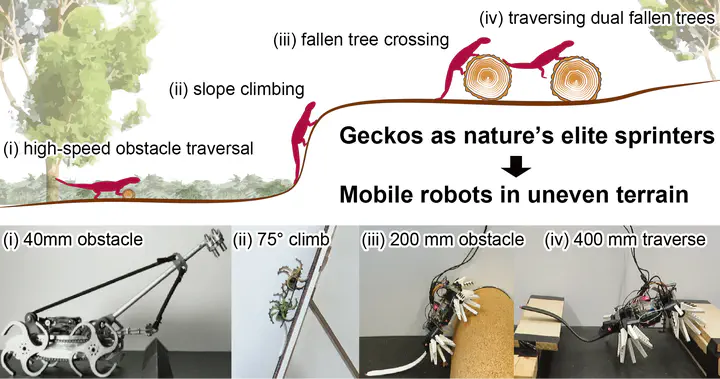
自然界のトップスプリンターであるトカゲから着想を得たロボット
目次
概要
非構造的で不規則な環境におけるロコモーションは、ロボット工学における永遠の課題である。特にそれは障害物が相対的に大きくなる小型ロボットにおいて顕著だ。そこで、野性の精鋭スプリンターであるトカゲから着想を得て、特定の機能設計(尻尾の能動・受動性、質量分布、質量の弾性保持など)が移動性能にどのように役立っているのかを研究した。はじめに回転脚機構と柔軟な頸部を有するプロトタイプを製作し、質量分布の変化が障害物通過の速度にどのような影響を与えるのかを調べました。次に柔軟な尻尾を追加し、壁面の登坂性能とその際の障害物乗り越え能力について調べた。最後にFin Ray回転脚機構と硬さの異なる能動動作可能な尻尾をもつロボットを開発し、ロボットの身体よりも大きな障害物の乗り越えに成功しました。このプラットフォームは生物の移動に関する「形態学的知性」を研究することにも役立ちます。
