🦘 PELE: HASEL駆動の筋骨格脚ロボット
静電油圧人工筋肉で動く脚ロボットが機敏で適応力があり、エネルギー効率の良いロコモーションを実現
目次
特徴
- ⚡ 俊敏な動き: ダイナミックに動き、高い跳躍を実現
- 🐈 高い適応力: 複雑な制御なしで、さまざまな地形を連続ホッピング
- 💚 省エネルギー: DCモーター駆動システムと比べて大幅に消費電力を削減
- 🚫 センサーレス: 筋肉の自己検知機能で、障害物にぶつかると自動で検出
概要
ロボットが非構造的な地形でもスムーズに移動するためには、俊敏性と適応性の両方を兼ね備えたアーキテクチャが重要です。 従来の脚式ロボットは、電磁モーターとセンサーシステムによるコンピューター制御に頼ることで地形の変化に適応していました。 しかし、この方法では動物のようなスムーズでエネルギー効率の高い動きが難しくなります。 そこで、私たちは静電油圧人工筋肉 (HASEL) を活用し、生物の筋骨格を模した脚ロボット (PELE) を開発しました。 このロボットは、障害物や地形の変化に自動で適応しながら、機敏でエネルギー効率の高いロコモーションを実現します。
動画
プロモーションビデオ
技術解説ビデオ
技術解説
筋骨格システム
PELEは、動物のロコモーションに対する高い汎化能力を模倣するため、筋骨格構造を採用しました。
従来の電磁モーター駆動システムは関節角度を正確に制御でき、高トルクを生み出すことができますが、
そのシステムはかさばり、重たく、システムとしてのコンプライアンスが低い傾向にあります。
一方、HASEL人工筋肉を使ったPELEは、軽量で柔軟な関節を持ち、より機敏で適応的なロコモーションをエネルギー効率高く実現します。
HASEL人工筋肉
PELEを動かすPeano-HASEL人工筋肉は、動物の筋肉と似た働きをします。
この人工筋肉は、液体を充填したプラスチック袋の両側に電圧をかけることで、静電効果を利用し伸び縮みするアクチュエーターです。
この筋肉は、軽量でかつパワフルでありながら、高いバックドライバビリティも備えています。
俊敏なロコモーション
PELEの脚は、10Hz以上の速さで往復動作し、自身の高さの40%の高さまでジャンプすることが可能です。

軽量・高剛性な強化カーボンファイバー(CFRP)骨格に、軽量(1つあたり15g)でパワフル(580W/kg)なHASEL人工筋肉を用いることで、慣性モーメントを減らし、機敏な動作を実現します。
適応的なロコモーション
PELEは、回転角センサーを使わないオープンループの力制御のみで、地形の凹凸や反力に応じて自ら動作を適応し、ロコモーションを行うことができます。 単純な周期的な電圧信号を与えるだけで、芝生、砂地、砂利、岩場と次々に変わる地面を適応的に連続でホッピングすることが可能です。
HASEL人工筋肉の力に基づく制御とそのバックドライバビリティにより、ロボットが環境と相互作用的に動作を生成できます。 そのため、地面の硬さや障害物に自動で適応する内在的なフィードバックシステムが存在していると言えます。

省エネルギーなロコモーション
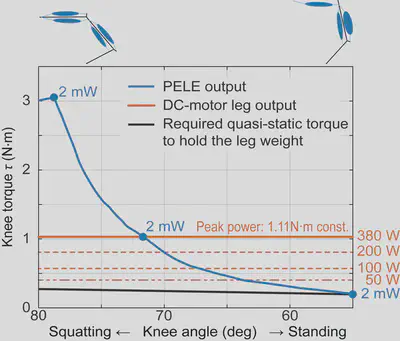
PELEは、従来のモーター駆動の脚よりも圧倒的に低い消費電力で動作します。 モーターシステムに見られるような温度の上昇はなく、最小限のエネルギー損失でロボットの姿勢を保持できます。 例えば、スクワット動作では、従来の電磁モーター脚のわずか1.2%のエネルギーしか使いません。
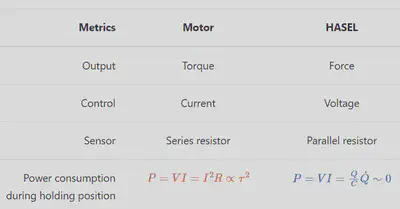
電磁モーターとは異なり、HASELの消費電力は無視できるほど小さいです。 これは、それぞれのアクチュエーターの根本的な動作原理の違いにあります。
- 電磁モーターは電流でトルクを発生させるため、消費電力はトルクの2乗に比例します。
- HASELは電圧で力を発揮するため、姿勢を保持する際の消費電力は原理的にはゼロになります。
センサーなしで障害物検知
PELEは外部センサーなしで障害物を自動的に検出して、その障害物を避けることができます。
HASEL人工筋肉はコンデンサとしての性質をもつため、筋肉の長さの変化を静電容量の変化として検出することができます。 この機能をロボットに組み込むことにより、障害物のセンサーレス・センシングを可能にしています。
将来の応用
PELEの技術は、森林や災害地帯など、複雑な環境でのロボット移動に役立ちます。 現在はブームアームに支えられた単脚ロボットとして研究中ですが、今後は四足歩行や二足歩行のロボットに拡張し、実世界への応用を目指していきます。
この研究により蓄積された技術により、将来、以下のようなロボットの開発に繋がる可能性があります。
- 物理的な環境適応性を生かし、制御による計算負荷を軽減するロボット
- より俊敏で動物のように不整地を縦横無尽に動き回るロボット
- 持続可能で省エネルギーなロボット
メディア掲載
テレビ
- BBC News | Click (16:35-) - Science program (UK)
- 3sat | Nano (4:14-) - Science program (Germany, Austria, Switzerland)
- SWR | SWR Aktuell (16:02-) - Evening news (Germany)
- YTN | YTN24 - Evening news (Korea)
- WKYT | Better Living - Morning news (USA)
- TNN ช่อง16 | TNN Tech REPORTS - Tech. program (Thailand)
- KBS | 월드24 - Evening news (Korea)
雑誌
- National Geographic | Forschende entwickeln Roboter mit künstlichen Muskeln
- Wirtschafts Woche | Unter Spannung: Künstliche Muskeln mobilisieren Roboter
- Stuttgarter Maschinenbau | Moderne robotik
ノミネート
- IEEE Spectrum | Video Friday
- nature communications | Editors’ Highlights
- Max Planck Society | Research highlights 2024
ニュース記事
(12ヶ国語以上の言語で、計200本以上の記事)
- REUTERS | What if robots had artificial muscles? (UK)
- AFP | First robot leg with ‘artificial muscles’ jumps nimbly (France)
- heise | Artificial muscle could replace electric motors in robots (Germany)
- Computer Bild | Roboterentwicklung: Künstlicher Muskel statt Elektromotoren (Germany)
- El Economista | Crean la primera pierna robótica con “músculos artificiales” (Spain)
- New York The Sun | First Robot Leg With ‘Artificial Muscles’ Can Jump, Researchers Say (USA)
- Science-X, TEch Xplore, Tech Briefs, Folha de Sao Paulo (Brazil), SIC Notícias (Portugal), TNN Thailand (Thailand), Rzeczpospolita (Poland), Executive Magazine.pl (Poland), The National Tribune (Australia), THE HINDU (India), Patrika (India), Al-Ahram (Egypt), THE JORDAN TIMES (Jordan), DW (Spain), CANADIAN AFFIARS (Canada), Barron’s (USA), Rossiyskaya Gazeta (Russia) The Daily Tribune (Bahrain), 人民日报 (China), 科技日报 (China), 조선일보 (Korea) Tip news (Japan)
論文
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
