🏃 棒高跳びロボット
ロボット工学の観点からのスポーツバイオメカニクス
目次
概要
棒高跳びはロボット工学において、とても興味深い研究テーマです。 この競技では、大きくしなるポールを活用した動作戦略、柔軟なポールを使った運動エネルギーから位置エネルギーへの変換、ポールを介して環境支持された状態での慣性的な動作生成等、ロボット工学に応用できる点がいくつもあります。 その中でも私たちは、アスリートがポールにぶら下がった状態で行う空中動作に着目し、能動的ポール曲げ理論(Active Pole Bending Theory) を提案することで、その動作をモデル化しました。 さらに、実際に棒高跳びができるロボットを開発し、その理論を実世界で実証し、1.6mの高さの跳躍に成功しました。 スポーツをロボット工学の視点から観察、分析し、さまざまな物理条件を探索することで、実際の競技では発見できない新たな知見を生み出すことを目指しています。
ポール支持期のアスリートの動作
棒高跳びにおいて、一般にポールを差し込み跳躍した後は、ダイナミクスに受動的に身を任せていると思われがちですが、 実はその間もポールにぶら下がった状態で、積極的に動作を行い、到達高さの向上に努めています。 実際、跳躍高さに寄与するエネルギーの約20%はぶら下がり時の身体動作から生み出されています。 私たちはこの身体動作を能動的ポール曲げ理論(Active Pole Bending Theory) を用いて解釈し、分析を行いました。
能動的ポール曲げ理論
はじめに、私たちはポール支持期の能動的な曲げ動作を表現するため、❝遷移座屈モデル❞という端末条件が曲げ入力に応じて変化可能なモデルを提案しました。
シミュレーションによる大域的なパラメーター探索
広範なシミュレーションを通じて、初速、ポールの長さ、曲げの強さ、スイッチングのタイミングがどのように相互作用して跳躍の高さに影響するかを明らかにしました。
Positive-bendingは跳躍角度を垂直にするのに役立ち、Negative-bendingは跳躍速度と反発力を向上させことが判明しました。
また、Positive-bendingとNegative-bendingの切り替えはポールの湾曲が最大になるタイミングに行うことが効果的であることが判明しました。
これはロボットと選手両方のパフォーマンスを向上させるための重要な戦略です。
PABRO(第一世代ロボット)
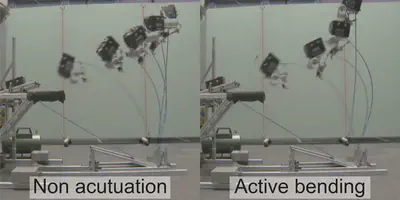
PABROは棒高跳びを行い、ポール支持期において、ポールに曲げモーメントを作用させることができます。 このロボットを用いて、能動的曲げ動作で跳躍高さが向上できることを実世界で実証しました。

PAULTER(第2世代ロボット)
単腕をもつPAULTERは。自身の慣性力を使ってポールに曲げモーメントを加え、より実際の棒高跳び競技に近い動作が可能です。 実験の結果、ポールの最大湾曲の直後にスイングアップモーションを行うことで、跳躍高さを有意に向上されることがわかりました。 このシミュレーション結果との最適タイミングの違いは、ロボットの重心がポール上からオフセットしている場合に、自身の慣性力を考慮する必要性から生まれています。

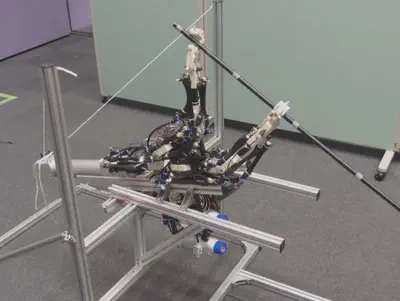
PAULTER II (第三世代ロボット)
PAULTER IIは、ポールを空中に放つこともできる双腕ロボットです。 このロボットと多重振り子シミュレーションを用いて、能動的ポール曲げ運動の切り替えタイミングによって、跳躍の方向と軌道を制御できることを示しました。 最適な戦略を用いることで、PAULTER IIは1.6mの高さの跳躍に成功しました。