🐿️ リスロボット
リスの空中姿勢制御能力を研究するためのリスロボット
目次
特徴
- 🐿️ 行動解析: リスは予期せぬ落下から尻尾の動きで回復
- 💻 シミュレーション解析: 胴体の回転が尻尾の回転に転化 (角運動量保存則)
- 🤖 ロボット解析:リスの制御戦略を用いてロボットがの空中姿勢制御を達成
概要
リスは、樹から樹へと跳ね回り、空中での姿勢制御が頻繁に必要がある環境に生息しています。 ある有名なYouTubeの動画では、リスが予期せず高所から弾き飛ばされ、空中で尻尾を使って胴体の回転を抑制し、無事に脚から着地する様子が映されています。 リスはまず尻尾を巧みに動かし頭の回転を安定させ、着地点を正確に捉えられるようにします。次に、尻尾を回転させることで胴体の回転を制御します。 コンピューターモデリングとリス型ロボットを用いた研究により、体重のわずか3%にしか満たない尻尾を慣性的に使用し、角運動量を胴体から尻尾へと移動させ、胴体の回転を抑制できることが明らかになりました。 この発見は、複雑な樹上環境において安全な着地を実現するための尻尾の重要な役割を示しています。
動画
観察と行動分析
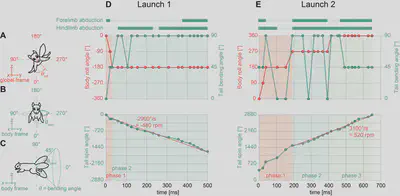
@MarkRober氏のYouTubeチャンネルに投稿された動画(下記参照)では、パルクールを行うリスが突然高所から弾き飛ばされる様子が見られます。 最初は体の回転が制御不能でしたが、リスは巧みに尾を動かし、体勢を安定させ、最終的に安全な場所へと着地しました。
この動画をフレームごとに分析し、リスの行動を観察しました。リスは最初に胴体と尻尾を協調して制御し、無秩序な回転から回復するとともに、頭を安定させ、着地点を視覚的に固定しました(フェーズ1)。
次に、尾を継続的に回転させることで反作用の運動量を生み出し、胴体の回転を減速させ、最終的に停止させて着地の準備をしました(フェーズ2)。
モデリングとシミュレーション研究
リスの物理モデル
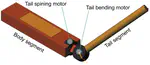
次に、リスのシミュレーションモデルを作成しました。Sciurus carolinensis(ハイイロリス)の標本の体節の質量と寸法を定量化し、MATLAB/SimulinkのSimscape Multibodyを用いて物理モデルを作成しました(下図参照)。
このモデルには、尻尾の屈曲と回転を制御する2つの自由度(DOF)があり、それぞれモータートルクによって駆動されます。
1つ目の自由度は体に接続されており、回転モーターは屈曲モーターの出力軸に取り付けられています。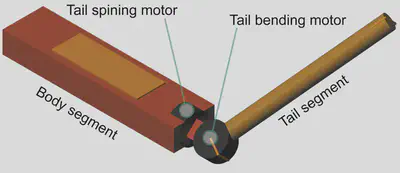
パラメータ表を表示するにはここをクリック
Model parameter
| Parameter | Variable | Axis | Value |
|---|---|---|---|
| Body mass (kg) | $m_\mathrm{b}$ | – | $0.330$ |
| Tail mass (kg) | $m_\mathrm{t}$ | – | $0.011$ |
| Body dimensions (m) | $l_\mathrm{bl}$ | length | $0.236$ |
| $l_\mathrm{bw}$ | width | $0.056$ | |
| $l_\mathrm{bh}$ | height | $0.03$ | |
| Tail dimensions (m) | $l_\mathrm{tl}$ | length | $0.215$ |
| $l_\mathrm{tw}$ | width (diameter) | $0.020$ | |
| Body moment of inertia about body CoM (kg·m^2) | $I_\mathrm{br}$ | Roll | $1.11 × 10^{-4}$ |
| $I_\mathrm{bp}$ | Pitch | $1.55 × 10^{-3}$ | |
| $I_\mathrm{by}$ | Yaw | $1.62 × 10^{-3}$ | |
| Tail moment of inertia about tail CoM (kg·m^2) | $I_\mathrm{tl}$ | Longitudinal | $4.26 × 10^{-5}$ |
| $I_\mathrm{ts}$ | Cross-sectioned | $5.50 × 10^{-7}$ |
ロール&ピッチからヨーへの回転軸の移動(フェーズ1)
尾翼をまっすぐな状態から急激に曲げることで、メインの回転軸がロール&ピッチからヨーにシフトします。
ヨー軸が最も慣性モーメントが大きいため、角運動量保存則に従い回転速度が低下し、リスは着地点を凝視する時間を確保できます。
胴体から尾部への角運動量移動(フェーズ2)
尻尾を静止状態から回転させることで、角運動量が胴体から尻尾に遷移し、胴体の回転速度が低下しました。
$$ I_\mathrm{br} \omega_\mathrm{init} + I_\mathrm{ts}\omega_\mathrm{init} = I'_\mathrm{tl}\omega_\mathrm{req} $$ $$ I'_\mathrm{tl} = I_\mathrm{tl} + m_\mathrm{t} \left( \frac{1}{2} l_\mathrm{tl} \right)^2 $$$\omega_\mathrm{init}$: 胴体と尻尾の初期回転角速度, $\omega_\mathrm{req}$: 胴体の静止に必要な尻尾回転角速度
さらに、リスの尻尾の特有の形態が姿勢安定性向上に寄与することもわかりました。
リスの尻尾の質量はたった体重の3.3% であるにもかかわらず、尻尾の長さは体長の91% あります。
そのため、予期せぬ落下に遭遇した際に尻尾をまっすぐにする(ロール軸のシステム慣性モーメントを小さくする)ことで、必要な尻尾回転速度を60%減少させることができます。
リスの慣性姿勢制御の戦略

ロボットと実験研究
ロボットの設計
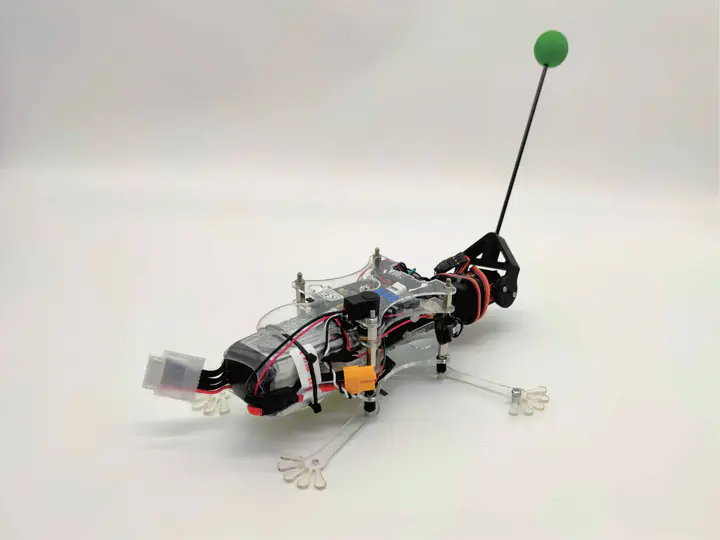
リスの空中姿勢制御をロボットで再現するため、尻尾が駆動可能なリス型ロボットを開発しました。
胴体と尻尾の質量と長さの比率は、実測のリス(胴長92%、体重3.4%)と一致するように設定しました。
ロボットは、胴体部と尾部とを2×1自由度のサーボジョイントで接続し、尾部の曲げ動作と回転動作を独立して行えます。
曲げ関節はデジタルサーボで作動され、回転関節はモータドライバ付きブラシレスモータで作動します。
このロボットは独立動作し、胴体には22.2V LiPoバッテリーとIMUが搭載されており、制御とデータ収集にはTeensy 4.1ボードを使用しています。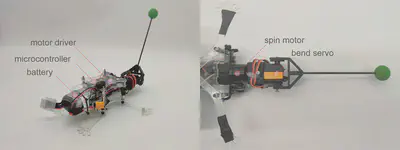
パラメータ表を表示するにはここをクリック
| Parameter | direction | value |
|---|---|---|
| Body mass (g) | – | 415 |
| Tail mass (g) | – | 14 |
| Body dimension (mm) | l, w, h | 190, 70, 60 (excl. feet parts) |
| Tail dimension (mm) | l, w | 175, 25 (at the counter mass ball) |
実験結果
ロボットを3.5mの高さからロール角速度を与えて落下させた結果、ロボットは尻尾の回転を利用して胴体の回転を止めることができました。
これはリスで観察され、シミュレーションで予測されたものと同様な結果であり、胴体の角運動量は尻尾に遷移させられました。
最後に
@MarkRober氏にこの研究をキャッチしてもらうことができました 🥳
Ok. This is awesome. I hope PhatGus was listed as an advisor. https://t.co/FjRYUOfkXC
— Mark Rober (@MarkRober) August 4, 2021