概要
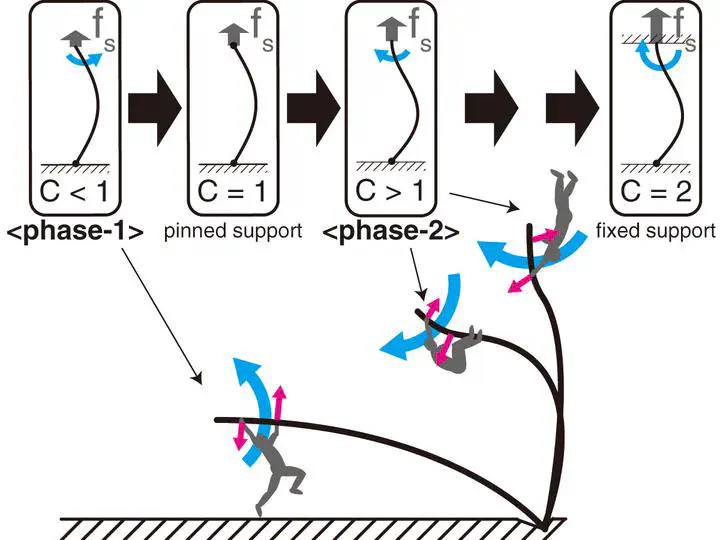
棒高跳びのパフォーマンスは、ポールを支持する段階において、アスリートがポールを能動的に操作することによって劇的に向上する可能性がある。本論文では、古典的なオイラー座屈の枠組みを拡張し、選手のポールに対する能動的な曲げ力の影響を捉える「遷移座屈モデル」(TBM)を提案する。ポールの上端と下端を固定支持状態として扱う従来のアプローチとは対照的に、TBMでは、曲げモーメントの入力に基づき、上端が異なる支持状態の間を遷移することを可能にする。シミュレーションを通じて、ポールを積極的に曲げることで、曲げ動作がない場合に比べ、跳躍の最大高さが増加することを示しました。さらに、我々の分析により、ポールが最大屈曲に達したときに正確に「ステップ入力」として曲げモーメントを変化させると、最適な改善が得られることが明らかになった。これらの知見は、跳躍性能を向上させるためにポールの変形を能動的に制御することの重要性を強調し、将来の棒高跳びロボットの効果的な制御戦略を指し示している。
タイプ
収録
6th International Symposium on Adaptive Motion of Animals and Machines (AMAM)