A musculoskeletal bipedal robot designed with angle-dependent moment arm for dynamic motion from multiple states
概要
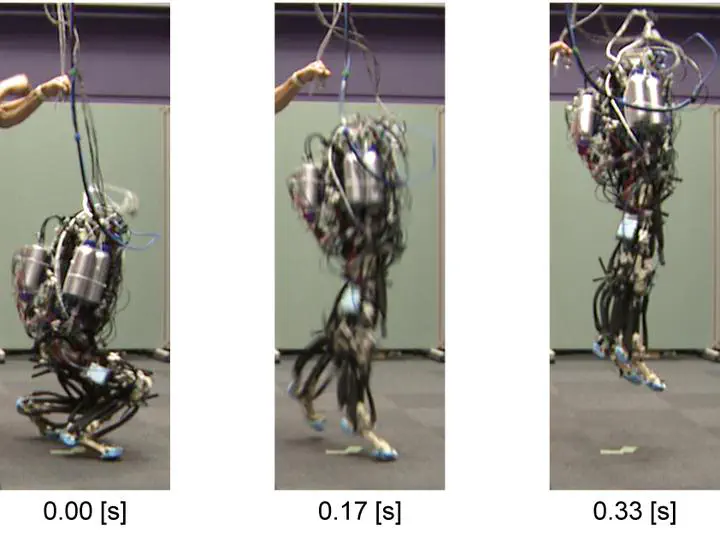
ロボットがダイナミックな動作をスムーズに行うためには、様々な姿勢で大きな力を発揮する必要がある。そこで、ロボットのダイナミックな動作において取り得る姿勢の幅を広げるために、関節に取り付けられたアクチュエータのトルク特性を調整可能な偏心回転構造を持つADMA(Angle-Dependent Moment Arm)を用いてロボットを設計することを提案する。ADMAを用いて設計されたロボット脚のジャンプシミュレーションから、ADMAが最適姿勢のシフトによる姿勢や動作タイミングの変化に対するロバスト性を向上させることを実証し、これは実物大の二足歩行ロボットを用いたジャンプ実験でも観察された。
タイプ
収録
Advanced Robotics