Compliance, mass distribution and contact forces in cursorial and scansorial locomotion with biorobotic physical models
概要
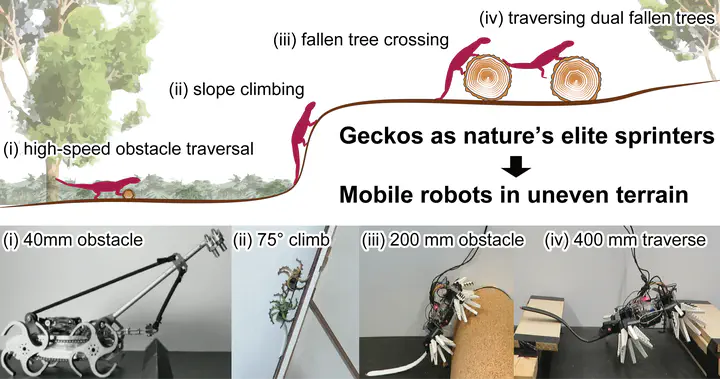
非構造的で不規則な環境におけるロコモーションは、ロボット工学における永遠の課題である。特に小規模な環境では、障害物の相対的な大きさが大きくなり、ロボットが障害物を乗り越えたり、移動モード間を移動したりすることが必要になることが多い。本論文では、起伏の多い地形で動作する移動ロボットのために、「形態学的知性」を用いて、アクティブおよびパッシブな尾部の使用、質量分布の変化、および質量の弾性支持に焦点を当て、さまざまな設計機能の有効性を探る。我々は、柔軟な頸部を持つ回転脚型ロボットの初期プロトタイプを開発し、その質量分布を変化させながら高速ロコモーションにおける障害物横断性能をテストする。次に、柔軟な尾部を持つプロトタイプの2回目の反復を検討し、斜面を上昇し障害物を横断する際の尾部と質量分布の効果を探る。これらのテストからの観察に基づき、性能を向上させた新しいプラットフォームとFin Ray型回転脚の構造を開発し、コンプライアンスを変化させた尾部を持つこのプラットフォームの、ロボット体より大きな障害物を横断する実験を紹介する。このバイオロボティック・プラットフォームは、ロボット工学にインスパイアされた動物の運動に関するバイオメカニクスの仮説の生成と検証に役立つ。
タイプ
収録
Advanced Robotics
Add the full text or supplementary notes for the publication here using Markdown formatting.