トップ
ポートフォリオ
注目論文
メディア掲載
|
自己紹介
業績一覧
プロジェクト
ブログ
ライト
ダーク
自動
リス
Inertial tail effects during righting of squirrels in unexpected falls: from behavior to robotics
リスの体重のたった3%重量の尻尾の慣性力は、予想外な落下から空中で立ち直りを可能にし、安全な着地を実現する。
福島 俊彦
,
Robert Siddall
,
Fabian Schwab
,
Séverine LD Toussaint
,
Greg Byrnes
,
John A. Nyakatura
,
Ardian Jusufi
PDF
引用
プロジェクト
動画
DOI
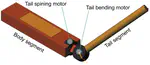
🐿️ リスロボット
リスの空中姿勢制御能力を研究するためのリスロボット
最終更新 3月 2, 2025
Project
Self-righting in squirrels during unexpected falls--towards the crucial function of bushy tails in arboreal mammals
尻尾の慣性動作はリスの空中での姿勢制御を可能にする。
福島 俊彦
,
Robert Siddall
,
Greg Byrnes
,
John a Nyakatura
,
Séverine Toussaint
,
Ardian Jusufi
引用
プロジェクト
ポスター
DOI
引用
×