トップ
ポートフォリオ
注目論文
メディア掲載
|
自己紹介
業績一覧
プロジェクト
ブログ
ライト
ダーク
自動
動物
🐟 魚ロボット
遊泳運動における筋活動の生物学的理解のためのロボットアニマル
最終更新 3月 1, 2025
Project
Inertial tail effects during righting of squirrels in unexpected falls: from behavior to robotics
リスの体重のたった3%重量の尻尾の慣性力は、予想外な落下から空中で立ち直りを可能にし、安全な着地を実現する。
福島 俊彦
,
Robert Siddall
,
Fabian Schwab
,
Séverine LD Toussaint
,
Greg Byrnes
,
John A. Nyakatura
,
Ardian Jusufi
PDF
引用
プロジェクト
動画
DOI
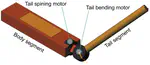
🐿️ リスロボット
リスの空中姿勢制御能力を研究するためのリスロボット
最終更新 3月 2, 2025
Project
Compliance, mass distribution and contact forces in cursorial and scansorial locomotion with biorobotic physical models
自然界のトップスプリンターであるトカゲの形態学的知性は、ロボットの非構造的環境下におけるロコモーションを可能にする。
Robert Siddall
,
福島 俊彦
,
Drilon Bardhi
,
Buna Perteshoni
,
Albulena Morina
,
Era Hasimja
,
Yll Dujaka
,
Gezim Haziri
,
Lina Martin
,
Hritwick Banerjee
,
Ardian Jusufi
PDF
引用
プロジェクト
動画
DOI
🦎 トカゲロボット
自然界のトップスプリンターであるトカゲから着想を得たロボット
最終更新 3月 1, 2025
Project
Modeling and control of a soft robotic fish with integrated soft sensing
eGaInセンサーとデータドリブンなモデルで完全に柔軟な魚ロボットの実時間制御を実現する。
Yu-Hsiang Lin
,
Robert Siddall
,
Fabian Schwab
,
福島 俊彦
,
Hritwick Banerjee
,
Youngjoon Baek
,
Daniel Vogt
,
Yong-Lae Park
,
Ardian Jusufi
PDF
引用
プロジェクト
動画
DOI
Self-righting in squirrels during unexpected falls--towards the crucial function of bushy tails in arboreal mammals
尻尾の慣性動作はリスの空中での姿勢制御を可能にする。
福島 俊彦
,
Robert Siddall
,
Greg Byrnes
,
John a Nyakatura
,
Séverine Toussaint
,
Ardian Jusufi
引用
プロジェクト
ポスター
DOI
引用
×