トップ
ポートフォリオ
注目論文
メディア掲載
|
自己紹介
業績一覧
プロジェクト
ブログ
ライト
ダーク
自動
生物規範ロボット
🏃 棒高跳びロボット
ロボット工学の観点からのスポーツバイオメカニクス
最終更新 3月 1, 2025
Project
Active bending motion of pole vault robot to improve reachable height
ポール支持期における能動ポール曲げ動作は棒高跳びロボットの跳躍高さを向上させる。
福島 俊彦
,
Satoshi Nishikawa
,
Yasuo Kuniyoshi
PDF
引用
プロジェクト
動画
DOI
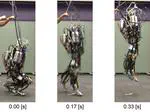
A musculoskeletal bipedal robot designed with angle-dependent moment arm for dynamic motion from multiple states
角度依存モーメントアーム機構は筋骨格ロボットの跳躍可能姿勢の幅を広げる
Satoshi Nishikawa
,
Kazutoshi Tanaka
,
Kazuya Shida
,
福島 俊彦
,
Ryuma Niiyama
,
Yasuo Kuniyoshi
PDF
引用
DOI
Effective timing of swing-up motion by a pole-vaulting robot
棒高跳びにおけるスイング動作は慣性的にポールに曲げモーメントを印可する。
Satoshi Nishikawa
,
福島 俊彦
,
Yasuo Kuniyoshi
PDF
引用
プロジェクト
DOI
«
引用
×