トップ
ポートフォリオ
注目論文
メディア掲載
|
自己紹介
業績一覧
プロジェクト
ブログ
ライト
ダーク
自動
空圧アクチュエーター
🐟 魚ロボット
遊泳運動における筋活動の生物学的理解のためのロボットアニマル
最終更新 3月 1, 2025
Project
Modeling and control of a soft robotic fish with integrated soft sensing
eGaInセンサーとデータドリブンなモデルで完全に柔軟な魚ロボットの実時間制御を実現する。
Yu-Hsiang Lin
,
Robert Siddall
,
Fabian Schwab
,
福島 俊彦
,
Hritwick Banerjee
,
Youngjoon Baek
,
Daniel Vogt
,
Yong-Lae Park
,
Ardian Jusufi
PDF
引用
プロジェクト
動画
DOI
Pole vaulting robot with dual articulated arms that can change reaching position using active bending motion
双椀ヒューマノイドロボットにより、1.67mの棒高跳びに成功する。
Satoshi Nishikawa
,
Tomohiro Kobayashi
,
福島 俊彦
,
Yasuo Kuniyoshi
PDF
引用
プロジェクト
DOI
🏃 棒高跳びロボット
ロボット工学の観点からのスポーツバイオメカニクス
最終更新 3月 1, 2025
Project
Active bending motion of pole vault robot to improve reachable height
ポール支持期における能動ポール曲げ動作は棒高跳びロボットの跳躍高さを向上させる。
福島 俊彦
,
Satoshi Nishikawa
,
Yasuo Kuniyoshi
PDF
引用
プロジェクト
動画
DOI
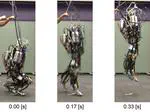
A musculoskeletal bipedal robot designed with angle-dependent moment arm for dynamic motion from multiple states
角度依存モーメントアーム機構は筋骨格ロボットの跳躍可能姿勢の幅を広げる
Satoshi Nishikawa
,
Kazutoshi Tanaka
,
Kazuya Shida
,
福島 俊彦
,
Ryuma Niiyama
,
Yasuo Kuniyoshi
PDF
引用
DOI
Effective timing of swing-up motion by a pole-vaulting robot
棒高跳びにおけるスイング動作は慣性的にポールに曲げモーメントを印可する。
Satoshi Nishikawa
,
福島 俊彦
,
Yasuo Kuniyoshi
PDF
引用
プロジェクト
DOI
引用
×