Robot Projects
🦘 PELE: A musculoskeletal robotic leg powered by HASELs
A robotic leg powered by electrohydraulic artificial muscles achieves agile, adaptive, yet energy-efficient locomotion.
🐟 Fish robot
A fish robot as a robotic animal for understanding the biology of muscle activity for swimming locomotion
🐿️ Squirrel robot
A squirrel robot for studying squirrel’s aerial righting ability.
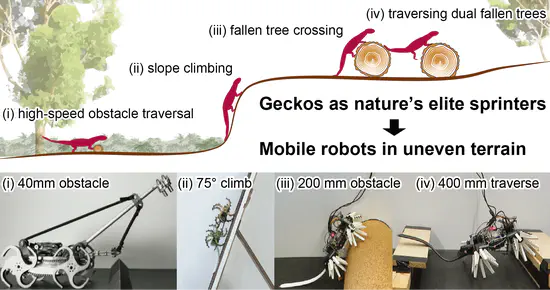
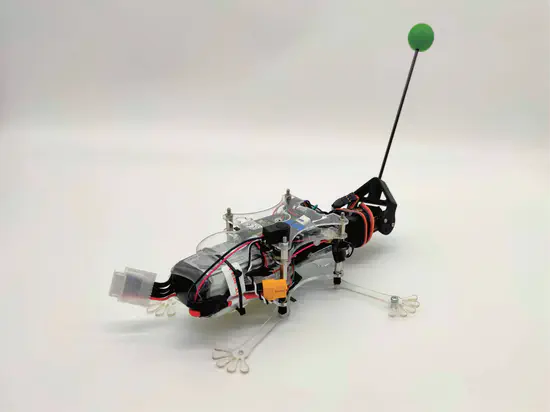
🦎 Gecko robots
Geckos robots inspired from a nature’s elite sprinter.
🏃 Pole vaulting robots
Sports Biomechanics from the Perspective of Robotics
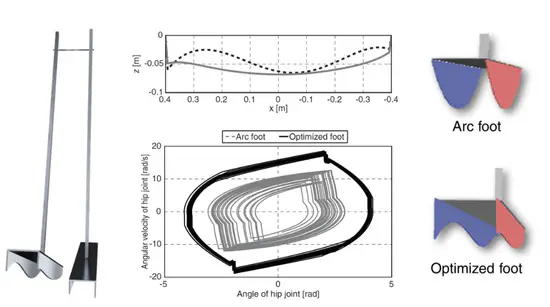
🚶 Passive Dynamic Walker
Optimizing foot shape of a passive dynamic walker enables robust walking against changes in slope inclination.