🦎 Gecko robots
Geckos robots inspired from a nature’s elite sprinter.
Table of Contents
Overview
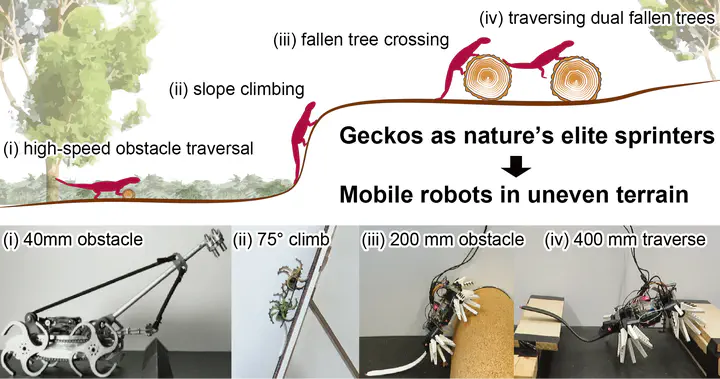
Robots often struggle in rough, uneven environments – especially at small scales, where obstacles can seem huge. We, inspired from geckos, studied how certain design features (such as active or passive tails, shifting weight, and flexible mass suspensions) can help. Our first prototype had a “whegged” design and a bendable neck to see how changing weight balance affects speed and obstacle crossing. A second prototype added a flexible tail for climbing and obstacle clearance. Finally, we developed a more advanced robot with fin-ray-style wheels and tails of different stiffness, able to tackle obstacles larger than its own body. This platform also helps us learn morphological intelligence of animal locomotion.
Video
Slides
Reference

Toshihiko Fukushima
Doctoral Researcher in Robotics
Researching bio-inspired robots with soft actuators.