🦘 PELE: A musculoskeletal robotic leg powered by HASELs
A robotic leg powered by electrohydraulic artificial muscles achieves agile, adaptive, yet energy-efficient locomotion.
Table of Contents
Features
- ⚡ Agile Movement: Executes dynamic motions and achieves high jumps.
- 🐈 High Adaptability: Easily hops over varying terrains without complex control.
- 💚 Energy Efficiency: Significantly reduces power consumption compared to DC motor-driven systems.
- 🚫 Sensor-less: Detects obstacles using intrinsic sensing capabilities of the muscles.
Overview
For robots to navigate unstructured terrain, they need an architecture possesssing both agility and adaptability. Conventional legged robots rely on electromagnetic motors and sensor-based computer control to adapt the locomotion to the terrains. However, this approach struggles to achieve animals’ agile and effortless motion. To address this, we developed a bio-inspired musculoskeletal robotic leg (PELE) leveraging electrohydraulic artificial muscles (HASELs). This robot achieves agile and energy-efficient locomotion while adapting to unstructured terrains.
Videos
Press Release Video
Technical Explanation Video
Technical Features
Musculoskeletal Design
PELE adopts a musculoskeletal structure to mimic the versatile locomotion of the animals.
Conventional electromagnetic motor-driven systems can precisely control joint angles and generate high torque.
However, they tend to be bulky, heavy, and lack of system compliance.
In contrast, PELE, powered by HASEL artificial muscles, features lightweight body and compliant joints, enabling more agile and adaptive locomotion with high energy efficiency.
PELE has two degrees of freedom (DoF) and is powered by two pairs of antagonistically arranged artificial muscles.
This structure enables smooth flexion and extension of the joints, allowing movements similar to biological limbs.
HASEL Artificial Muscles
PELE is powered by Peano-HASEL artificial muscles, which function similarly to biological muscles.
These actuators contract and expand using electrostatic forces by applying voltage to a liquid-filled plastic pouch.
They are lightweight, powerful, and highly backdrivable.
Agile Locomotion
PELE’s leg oscillate at over 10 Hz and can jump up to 40% of its own height.

By utilizing a lightweight and high-rigidity carbon fiber-reinforced polymer (CFRP) skeleton and lightweight (15g each) and powerful (580W/kg) HASEL artificial muscles, it reduces moment of inertia, achieving highly agile motion.
Adaptive Locomotion
Using open-loop force control without rotational angle sensors, PELE automatically adapts to unstructured terrain.
Solely with a simple cyclic voltage signal, PELE continuously hops over varying terrains such as grass, sand, gravel, and rocky surfaces.
Thanks to force-based control and the high backdrivability of HASEL artificial muscles, the robot can dynamically interact with its environment, effectively emerging an intrinsic feedback loop that enables automatic terrain adaptation.

Energy-Efficient Locomotion
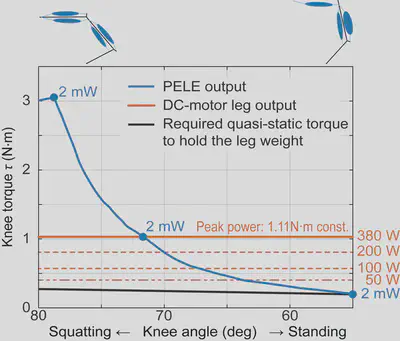
PELE operates with drastically lower power consumption than conventional electromagnetic-motor-driven systems.
Unlike motor systems, it does not experience heat buildup and maintains posture with minimal energy loss.
For example, during a squatting motions, PELE consumes only 1.2% of the energy required by conventional electromagnetic-motor-driven legs.
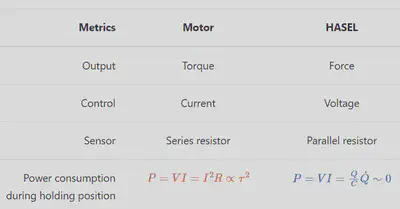
Unlike electromagnetic motors, HASEL actuators consume negligible power when holding a position. This is due to a fundamental difference in actuation principles:
- Electromagnetic motors generate torque via current, meaning power consumption is proportional to torque squared.
- HASEL actuators generate force via voltage, meaning theoretical power consumption at a static position is nearly zero.
Sensor-less Obstacle Detection
PELE detects obstacles without external sensors and automatically avoids them.
HASEL artificial muscles function as capacitors, allowing them to detect changes in length as variations in capacitance.
This enables sensor-less obstacle detection, providing an intrinsic sensing mechanism for the robot.
Future Applications
PELE’s technology can be applied to robotic mobility in complex environments, such as forests and disaster zones.
Currently, PELE is a single-legged robot supported by a boom arm, but in the future, we aim to expand this concept to quadrupedal and bipedal robots for real-world applications.
This research paves the way for the development of robots with the following capabilities:
- Robots that reduce computational burden by leveraging physical adaptability
- Highly agile robots capable of freely traversing unstructured environment like animals
- Sustainable and energy-efficient robots
Media Exposure
TV shows
- BBC News | Click (16:35-) - Science program (UK)
- 3sat | Nano (4:14-) - Science program (Germany, Austria, Switzerland)
- SWR | SWR Aktuell (16:02-) - Evening news (Germany)
- YTN | YTN24 - Evening news (Korea)
- WKYT | Better Living - Morning news (USA)
- TNN ช่อง16 | TNN Tech REPORTS - Tech. program (Thailand)
- KBS | 월드24 - Evening news (Korea)
Magazines
- National Geographic | Forschende entwickeln Roboter mit künstlichen Muskeln
- Wirtschafts Woche | Unter Spannung: Künstliche Muskeln mobilisieren Roboter
- Stuttgarter Maschinenbau | Moderne robotik
Selections
- IEEE Spectrum | Video Friday
- nature communications | Editors’ Highlights
- Max Planck Society | Research highlights 2024
News articles
(Over 200+ articles in 12+ languages)
- REUTERS | What if robots had artificial muscles? (UK)
- AFP | First robot leg with ‘artificial muscles’ jumps nimbly (France)
- heise | Artificial muscle could replace electric motors in robots (Germany)
- Computer Bild | Roboterentwicklung: Künstlicher Muskel statt Elektromotoren (Germany)
- El Economista | Crean la primera pierna robótica con “músculos artificiales” (Spain)
- New York The Sun | First Robot Leg With ‘Artificial Muscles’ Can Jump, Researchers Say (USA)
- Science-X, TEch Xplore, Tech Briefs, Folha de Sao Paulo (Brazil), SIC Notícias (Portugal), TNN Thailand (Thailand), Rzeczpospolita (Poland), Executive Magazine.pl (Poland), The National Tribune (Australia), THE HINDU (India), Patrika (India), Al-Ahram (Egypt), THE JORDAN TIMES (Jordan), DW (Spain), CANADIAN AFFIARS (Canada), Barron’s (USA), Rossiyskaya Gazeta (Russia) The Daily Tribune (Bahrain), 人民日报 (China), 科技日报 (China), 조선일보 (Korea) Tip news (Japan)
Reference
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion

Toshihiko Fukushima
Doctoral Researcher in Robotics
Researching bio-inspired robots with soft actuators.