🏃 Pole vaulting robots
Sports Biomechanics from the Perspective of Robotics
Table of Contents
Overview
Pole vaulting is a highly intriguing research topic in robotics. This sport involves several aspects that can be applied to robotics, including robot motion strategies utilizing a highly flexible pole, conversion of kinetic energy into potential energy using the pole, and generation of inertial movements while being supported by the environment through the pole. Among these, we focused on the aerial movements performed by athletes while hanging onto the pole, and proposed the Active Pole Bending Theory to model these movements. Furthermore, we developed robots capable of performing pole vaulting and experimentally validated the theory in a real-world setting, successfully achieving a jump height of 1.6 meters. By observing and analyzing sports from a robotics perspective and exploring various physical conditions, we aim to uncover new insights and benefit the sports.
Athlete Movements During the Pole Support Phase
In pole vaulting, it is commonly believed that after inserting the pole and initiating the jump, the athlete simply follows passive dynamics. However, in reality, while hanging onto the pole, athletes actively move their bodies to maximize their vaulting height. In fact, approx. 20% of the energy contributing to jump height is generated through the body movements performed while hanging on the pole. We analyzed these body movements using the Active Pole Bending Theory, interpreting and examining how athletes’ movements contribute to the system.
Active Pole Bending Theory
First, we proposed “Transition Buckling Model” to describe active bending behavior during the pole support phase, where the terminal conditions can be varied according to the bending input.
Simulation Study
Through extensive simulations, we revealed how initial velocity, pole length, bending amplitude, and switching time interact to affect vault height.
Positive-bending helps verticalize the vault angle, while negative-bending boosts vault speed and resilience.
We also found that switching between Positive-bending and Negative-bending was the most effective when done at the time of maximum pole deflection.
These results indicates key strategies for improving both robot and athlete performance.
PABRO (1st Gen. Robot)
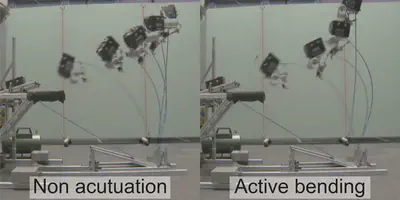
PABRO performs pole vaulting and can exert bending moment on a pole during the pole support phase. Using this robot, we have demonstrated in the real world that active bending motion can improve vaulting height.

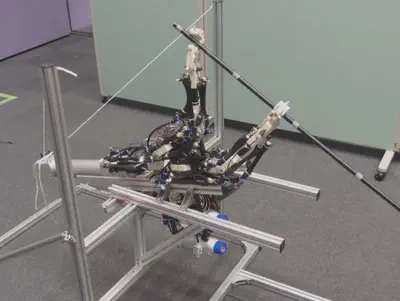
PAULTER (2nd Gen. Robot)
PAULTER, a single-arm pole vaulting robot, uses its own inertial force to apply a bending moment to the pole, enabling it to perform a motion more similar to an actual pole vault competition. Experimental results showed that a swing-up motion after the maximum deflection of the pole can significantly increase the vaulting height. This difference in optimal timing from the simulation results arises from the the robot’s own inertial forces when its CoM is offset from the pole.

PAULTER II (3rd Gen. Robot)
PAULTER II is a dual-armed robot that can also release a pole in the air. Using this robot and a multiple-pendulum simulation, we found that the direction and trajectory of the vaulting can be controlled by the switch timing of the active bending motions. By using an optimal strategy, PAULTER II successfully vaulted 1.6 m height.
Reference


Toshihiko Fukushima
Doctoral Researcher in Robotics
Researching bio-inspired robots with soft actuators.