Top
Portfolio
Selected papers
Media
|
Biography
Publications
Projects
Blog
Light
Dark
Automatic
English
English
日本語
Home
All publications
All publications
Type
Journal article
Conference paper
Date
2026
2024
2022
2021
2015
2014
2013
Nature Communications 2026 :
Ultralight soft electrostatic actuators based on solid-liquid-gas architectures
The introduction of the third phase, gaseous dielectrics, into solid-liquid actuators allows for the creation of ultralight soft electrostatic actuators.
Hyeong-Joon Joo
,
Toshihiko Fukushima
,
Xiying Li
,
Alona S. Shomron
,
Soo J.A. Koh,
,
Philipp Rothemund
,
Christoph Keplinger
PDF
Cite
Source Document
DOI
PNAS 2026 :
A method to study and enhance the energy efficiency of soft electrostatic actuators
Closed cycles on the work conjugate planes enables study and enhance energy efficiency of soft electrostatic actuators.
Steven L. Zhang
,
Toshihiko Fukushima
,
Sophie Kirkman
,
Soo Jin Adrian Koh
,
Philipp Rothemund
,
Christoph Keplinger
PDF
Cite
DOI
Nature Communications 2024 :
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
Soft electrohydraulic artificial muscles enable robotic legs for agile, adaptive, yet energy-efficient locomotion.
Thomas JK Buchner
,
Toshihiko Fukushima
,
Amirhossein Kazemipour
,
Stephan-Daniel Gravert
,
Manon Prairie
,
Pascal Romanescu
,
Philip Arm
,
Yu Zhang
,
Xingrui Wang
,
Steven L Zhang
,
Johannes Walter
,
Christoph Keplinger
,
Robert K Katzschmann
PDF
Cite
Project
Video
DOI
Press release
Sports Biomechanics 2022 :
Active pole bending effect in pole support phase
Globally explore sensitivities and interacteve effects of motion parameters during pole support phase to increase vaulting height
Toshihiko Fukushima
,
Satoshi Nishikawa
,
Yasuo Kuniyoshi
PDF
Cite
Project
Video
DOI
Integrative and Comparative Biology 2021 :
Inertial tail effects during righting of squirrels in unexpected falls: from behavior to robotics
Squirrel’s very light tail (just 3% of body mass) can inertially stabilize their body from unexpected falls.
Toshihiko Fukushima
,
Robert Siddall
,
Fabian Schwab
,
Séverine LD Toussaint
,
Greg Byrnes
,
John A. Nyakatura
,
Ardian Jusufi
PDF
Cite
Project
Video
DOI
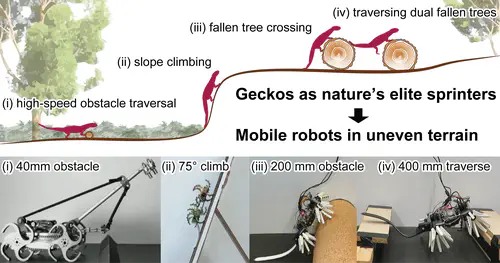
Advanced Robotics 2021 :
Compliance, mass distribution and contact forces in cursorial and scansorial locomotion with biorobotic physical models
Geckos, as nature’s elite sprinters, inspire mobile robots on uneven terrain.
Robert Siddall
,
Toshihiko Fukushima
,
Drilon Bardhi
,
Buna Perteshoni
,
Albulena Morina
,
Era Hasimja
,
Yll Dujaka
,
Gezim Haziri
,
Lina Martin
,
Hritwick Banerjee
,
Ardian Jusufi
PDF
Cite
Project
Video
DOI
Advanced Intelligent Systems 2021 :
Modeling and control of a soft robotic fish with integrated soft sensing
Soft robotic fish: real-time tail-beat control using eGaIn strain sensing and a lightweight-data-driven model.
Yu-Hsiang Lin
,
Robert Siddall
,
Fabian Schwab
,
Toshihiko Fukushima
,
Hritwick Banerjee
,
Youngjoon Baek
,
Daniel Vogt
,
Yong-Lae Park
,
Ardian Jusufi
PDF
Cite
Project
Video
DOI
SICB 2021 :
Self-righting in squirrels during unexpected falls--towards the crucial function of bushy tails in arboreal mammals
Squirrels reorient their bodies in the air with the movement of their tails.
Toshihiko Fukushima
,
Robert Siddall
,
Greg Byrnes
,
John a Nyakatura
,
Séverine Toussaint
,
Ardian Jusufi
Cite
Project
Poster
DOI
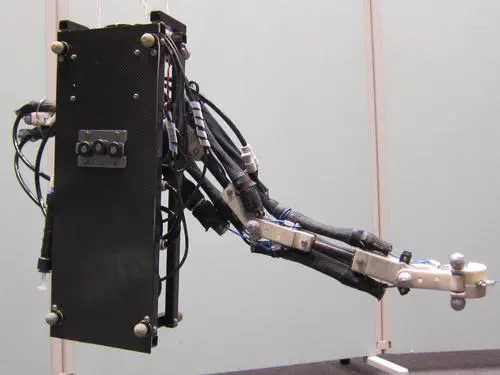
Humanoids 2015 :
Pole vaulting robot with dual articulated arms that can change reaching position using active bending motion
A dual hand robot achieves pole vaulting to jump 1.67m.
Satoshi Nishikawa
,
Tomohiro Kobayashi
,
Toshihiko Fukushima
,
Yasuo Kuniyoshi
PDF
Cite
Project
DOI
ICRA 2014 :
Active bending motion of pole vault robot to improve reachable height
Robotic active bending motion during pole support phase improves reachable height of the robot.
Toshihiko Fukushima
,
Satoshi Nishikawa
,
Yasuo Kuniyoshi
PDF
Cite
Project
Video
DOI
Advanced Robotics 2014 :
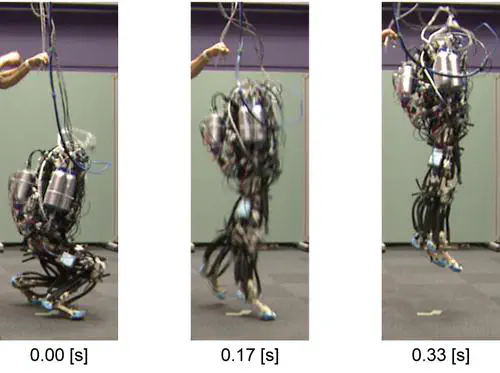
A musculoskeletal bipedal robot designed with angle-dependent moment arm for dynamic motion from multiple states
Angle-dependent moment arm (ADMA) extends the range of possible jumping postures for musculoskeletal robots.
Satoshi Nishikawa
,
Kazutoshi Tanaka
,
Kazuya Shida
,
Toshihiko Fukushima
,
Ryuma Niiyama
,
Yasuo Kuniyoshi
PDF
Cite
DOI
Transactions of the Society of Instrument and Control Engineers 2014 :
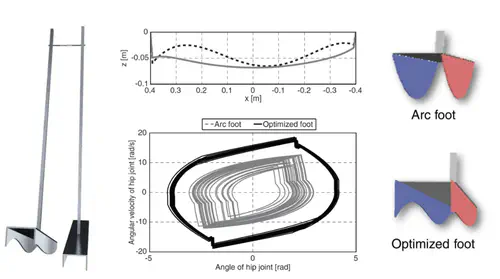
Gait Stabilization of Passive Dynamic Walking by Foot Shape Optimization
Optimized feet shape of the passive dynamic walker enhance its walking robustness in slope angles.
Toshihiko Fukushima
,
Kazuyuki Hyodo
,
Michihiro Kawanishi
,
Tatsuo Narikiyo
PDF
Cite
Project
DOI
ICAR 2013 :
Effective timing of swing-up motion by a pole-vaulting robot
The swing-up motion in pole vaulting inertially generates bending moment on the pole.
Satoshi Nishikawa
,
Toshihiko Fukushima
,
Yasuo Kuniyoshi
PDF
Cite
Project
DOI
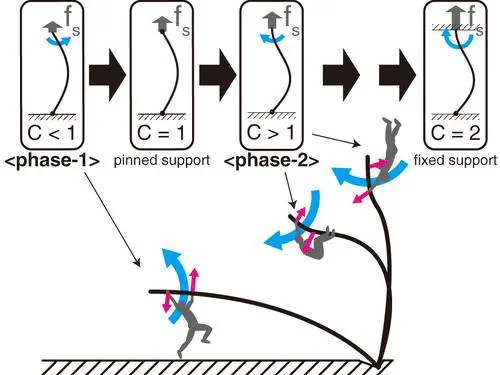
AMAM 2013 :
Transitional buckling model for active bending effect in pole vault
Pole vaulters actively bend the poles to improve vaulting height.
Toshihiko Fukushima
,
Satoshi Nishikawa
,
Kazutoshi Tanaka
,
Yasuo Kuniyoshi
PDF
Cite
Project
Poster
Cite
×