Abstract
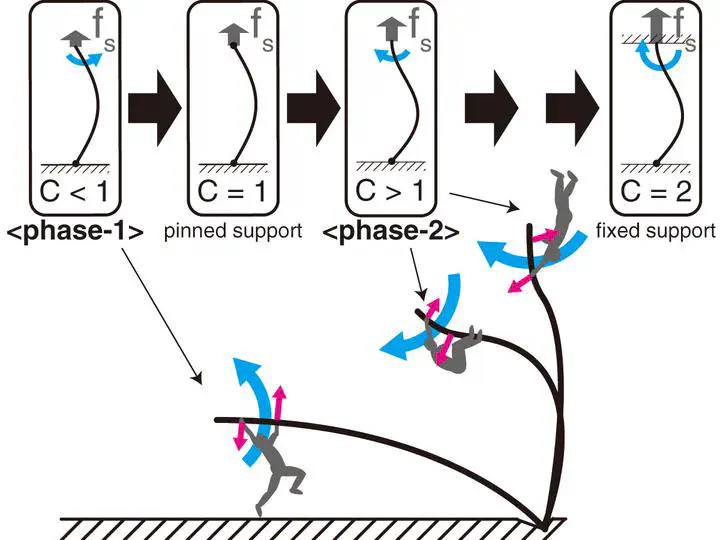
Pole vaulting performance can be dramatically improved by the athlete’s active manipulation of the pole during pole support phase. This paper proposes a “Transitional Buckling Model” (TBM) that extends the classical Euler buckling framework to capture the effects of athletes’s active bending force to the pole. In contrast to prior approaches treating the top and bottom ends of the pole as fixed support conditions, TBM allows the top end to transition between different support states based on a bending moment input. Through simulation, we show that the active pole bending increases the maximum vault height compared to no bending motion. Furthermore, our analysis reveals that changing the bending moment as a “step input” precisely when the pole reaches its maximum bend provides an optimal improvement. These findings emphasize the importance of actively regulating pole deformation in order to enhance vaulting performance and point toward an effective control strategy for future pole-vaulting robots.
Toshihiko Fukushima
Doctoral Researcher in Robotics
Researching bio-inspired robots with soft actuators.