A musculoskeletal bipedal robot designed with angle-dependent moment arm for dynamic motion from multiple states
Abstract
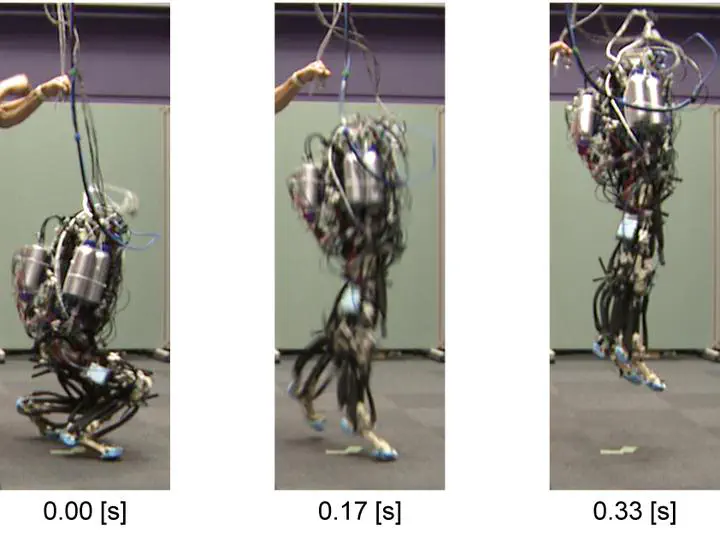
When robots make smooth transitions in dynamic motions, they must exert large force over widely various postures. To expand the range of postures that robots can take during dynamic motions, we propose that robots be designed with an Angle-Dependent Moment Arm (ADMA) with biased pivot, for which torque characteristics of actuators attached to joints are adjustable. From jumping simulations of robotic legs designed with ADMA, we demonstrate that ADMA improves robustness to postural and motion timing changes by shifts of the optimal posture, which are also observed in jumping experiments using a full-sized, bipedal robot.
Type
Publication
Advanced Robotics
Toshihiko Fukushima
Doctoral Researcher in Robotics
Researching bio-inspired robots with soft actuators.