Abstract
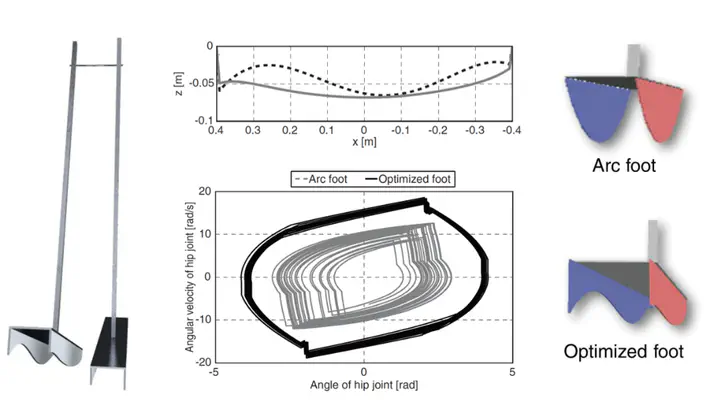
The passive dynamic walker has excellent energy efficiency, but has problems maintaining a stable gait in real-world environments. In particular, it is sensitive to changes in slope angle. To overcome this problem, previous research has applied different foot radius shapes for each slope angle to achieve stable gait. However, this approach cannot be applied to varying slope angles. In this paper, we propose a foot shape design that can walk robustly in multiple tilt angles. We optimised the foot shape by genetic algorithm and discussed how it improved the gait performance.
Type
Publication
Transactions of the Society of Instrument and Control Engineers
Toshihiko Fukushima
Doctoral Researcher in Robotics
Researching bio-inspired robots with soft actuators.