Top
Portfolio
Selected papers
Media
|
Biography
Publications
Projects
Blog
Light
Dark
Automatic
Musculoskeletal Robot
Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion
Soft electrohydraulic artificial muscles enable robotic legs for agile, adaptive, yet energy-efficient locomotion.
Thomas JK Buchner
,
Toshihiko Fukushima
,
Amirhossein Kazemipour
,
Stephan-Daniel Gravert
,
Manon Prairie
,
Pascal Romanescu
,
Philip Arm
,
Yu Zhang
,
Xingrui Wang
,
Steven L Zhang
,
Johannes Walter
,
Christoph Keplinger
,
Robert K Katzschmann
PDF
Cite
Project
Video
DOI
Press release
🦘 PELE: A musculoskeletal robotic leg powered by HASELs
A robotic leg powered by electrohydraulic artificial muscles achieves agile, adaptive, yet energy-efficient locomotion.
Last updated on Mar 1, 2025
Project
Pole vaulting robot with dual articulated arms that can change reaching position using active bending motion
A dual hand robot achieves pole vaulting to jump 1.67m.
Satoshi Nishikawa
,
Tomohiro Kobayashi
,
Toshihiko Fukushima
,
Yasuo Kuniyoshi
PDF
Cite
Project
DOI
🏃 Pole vaulting robots
Sports Biomechanics from the Perspective of Robotics
Last updated on Mar 1, 2025
Project
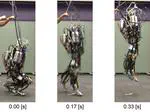
A musculoskeletal bipedal robot designed with angle-dependent moment arm for dynamic motion from multiple states
Angle-dependent moment arm (ADMA) extends the range of possible jumping postures for musculoskeletal robots.
Satoshi Nishikawa
,
Kazutoshi Tanaka
,
Kazuya Shida
,
Toshihiko Fukushima
,
Ryuma Niiyama
,
Yasuo Kuniyoshi
PDF
Cite
DOI
Effective timing of swing-up motion by a pole-vaulting robot
The swing-up motion in pole vaulting inertially generates bending moment on the pole.
Satoshi Nishikawa
,
Toshihiko Fukushima
,
Yasuo Kuniyoshi
PDF
Cite
Project
DOI
Cite
×