Top
Portfolio
Selected papers
Media
|
Biography
Publications
Projects
Blog
Light
Dark
Automatic
Optimization
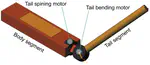
🐟 Fish robot
A fish robot as a robotic animal for understanding the biology of muscle activity for swimming locomotion
Last updated on Mar 1, 2025
Project
Inertial tail effects during righting of squirrels in unexpected falls: from behavior to robotics
Squirrel’s very light tail (just 3% of body mass) can inertially stabilize their body from unexpected falls.
Toshihiko Fukushima
,
Robert Siddall
,
Fabian Schwab
,
Séverine LD Toussaint
,
Greg Byrnes
,
John A. Nyakatura
,
Ardian Jusufi
PDF
Cite
Project
Video
DOI
🐿️ Squirrel robot
A squirrel robot for studying squirrel’s aerial righting ability.
Last updated on Mar 2, 2025
Project
Modeling and control of a soft robotic fish with integrated soft sensing
Soft robotic fish: real-time tail-beat control using eGaIn strain sensing and a lightweight-data-driven model.
Yu-Hsiang Lin
,
Robert Siddall
,
Fabian Schwab
,
Toshihiko Fukushima
,
Hritwick Banerjee
,
Youngjoon Baek
,
Daniel Vogt
,
Yong-Lae Park
,
Ardian Jusufi
PDF
Cite
Project
Video
DOI
Self-righting in squirrels during unexpected falls--towards the crucial function of bushy tails in arboreal mammals
Squirrels reorient their bodies in the air with the movement of their tails.
Toshihiko Fukushima
,
Robert Siddall
,
Greg Byrnes
,
John a Nyakatura
,
Séverine Toussaint
,
Ardian Jusufi
Cite
Project
Poster
DOI
🚶 Passive Dynamic Walker
Optimizing foot shape of a passive dynamic walker enables robust walking against changes in slope inclination.
Last updated on Mar 1, 2025
Project
Gait Stabilization of Passive Dynamic Walking by Foot Shape Optimization
Optimized feet shape of the passive dynamic walker enhance its walking robustness in slope angles.
Toshihiko Fukushima
,
Kazuyuki Hyodo
,
Michihiro Kawanishi
,
Tatsuo Narikiyo
PDF
Cite
Project
DOI
Cite
×