Top
Portfolio
Selected papers
Media
|
Biography
Publications
Projects
Blog
Light
Dark
Automatic
Soft Robotics
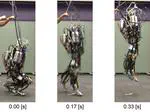
A musculoskeletal bipedal robot designed with angle-dependent moment arm for dynamic motion from multiple states
Angle-dependent moment arm (ADMA) extends the range of possible jumping postures for musculoskeletal robots.
Satoshi Nishikawa
,
Kazutoshi Tanaka
,
Kazuya Shida
,
Toshihiko Fukushima
,
Ryuma Niiyama
,
Yasuo Kuniyoshi
PDF
Cite
DOI
Effective timing of swing-up motion by a pole-vaulting robot
The swing-up motion in pole vaulting inertially generates bending moment on the pole.
Satoshi Nishikawa
,
Toshihiko Fukushima
,
Yasuo Kuniyoshi
PDF
Cite
Project
DOI
Transitional buckling model for active bending effect in pole vault
Pole vaulters actively bend the poles to improve vaulting height.
Toshihiko Fukushima
,
Satoshi Nishikawa
,
Kazutoshi Tanaka
,
Yasuo Kuniyoshi
PDF
Cite
Project
Poster
«
Cite
×