概要
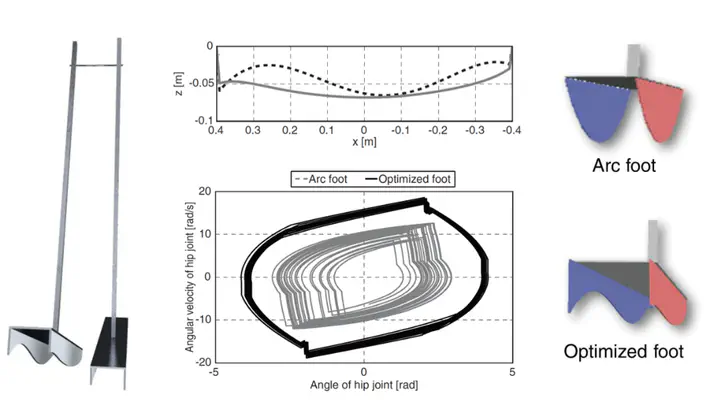
受動歩行機はエネルギー効率に優れているが、実環境で安定した歩行を維持することに問題がある。特に斜面の傾斜角度の変化に敏感である。この問題を解決するために、これまでの研究では、傾斜角度に応じた足裏部の円弧半径を採用することにより、歩容の安定化を図ってきました。しかし、これには特定の傾斜角への局所最適化であり、異なる傾斜角の斜面を歩行することはできない。そこで本論文では、遺伝的アルゴリズムを用いて足裏形状を最適化し、複数の斜面角度に対してロバストな歩行を実現する足形状を提案する。そして、歩行性能の向上の理由について考察する。
タイプ
収録
計測自動制御学会論文集